前沿的铣削运动学技术正显著缩小传统工业机器人与高精度机床之间的性能差距,为实现资源高效、柔性化的自动化生产奠定重要基础。该技术支持高效、精准加工多种材料,涵盖纤维复合材料、铝材乃至淬硬钢等难加工材料。
这一全球首创的技术成果将于2025年9月22–26日在德国汉诺威EMO展会(世界领先生产技术展)上首次现场演示。弗劳恩霍夫制造技术与先进材料研究所(Fraunhofer IFAM, Stade)将携手西门子(Siemens AG)及autonox Robotics GmbH,联合亮相西门子展台(6号馆F30)。
极致精度与动态性能赋能生产
Fraunhofer IFAM与西门子共同开发的这一突破性技术,旨在全面提升工业机器人的动态性能与加工精度。该方案融合智能模型驱动控制策略、创新驱动技术,以及经autonox Robotics优化的机械机器人结构,能够有效补偿动态误差、抑制振动,从而显著提升路径精度,即便在高速进给和复杂轨迹加工中仍可保持稳定。
其突出优势在于卓越的抗干扰能力——即使在高动态工艺力作用下,仍能维持稳定的加工精度。该驱动概念不仅支持更高的材料去除率,还允许在更高加加速度(jerk)参数下稳定运行,从而大幅提升生产效率。
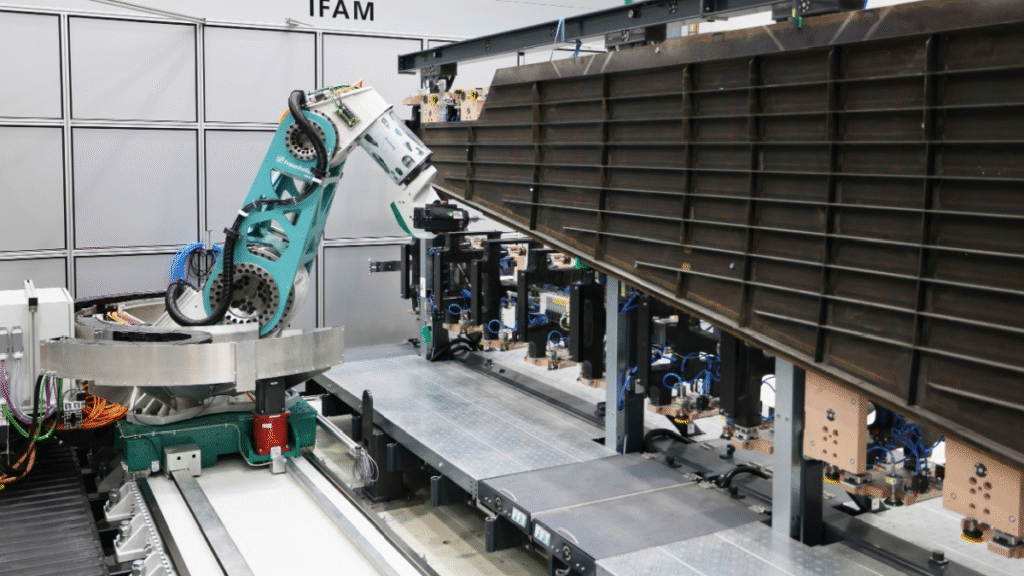
凭借这些特性,“机床机器人”(MTR)成功弥合了传统工业机器人与机床之间的性能鸿沟,尤其适用于高要求的制造工艺(如硬质材料加工),并为自动化与智能制造开辟了新的可能性。
替代性的机床概念
工业机器人为一种替代性机床理念提供了可能,尤其是在结合表面移动平台或额外直线轴等工作空间扩展方案,或者与其他机器人协同使用时。
与龙门系统或传统机床相比,这一机床概念更节省空间,同时不会因大尺寸单体部件而增加经济负担。此外,无需特殊基础设施,从而为未来生产线的灵活改造提供了便利。
串联关节臂运动学与直线轴的组合,相比大型龙门及专用机床具有显著优势。直线轴结构紧凑、采用模块化设计,系统柔性极高。通过双预加载齿条-齿轮驱动,有效抑制反向间隙,保证直线轴滑座在机器人加工过程中的高刚性。凭借直线轴的高结构刚度,即使在较大杠杆臂工况下,机器人仍能保持优良精度。
“CaliRob”——工业机器人与直线轴的模型化标定
Fraunhofer IFAM(Stade)开发的软件“CaliRob”,为精度提升提供了一项关键互补技术。由于制造公差不可避免,实际运行中工业机器人会偏离理想系统,导致目标位置出现数毫米级的误差。若无法识别和补偿此类偏差,机器人系统难以达到所需的高精度。
因此,工业机器人必须根据实际需求进行标定,而“CaliRob”正是为此设计的解决方案。其核心是一个涵盖200多个参数的数学模型,可全面描述搭载直线轴的机器人运动学特性。
应用前景广阔
接下来,Fraunhofer IFAM专家将与西门子及autonox Robotics GmbH合作,在高要求的工业场景中对这一新型机器人系统进行全面测试,进一步挖掘其潜力。测试系统将搭载由Weiss Spindeltechnologie研发的高承载力机器人主轴。
机床机器人结合直线轴后,加工范围极为广泛,涵盖航空航天领域的轻质纤维复合结构与铝合金,以及铁路、商用车、造船与能源行业常用的钢材与钛合金等硬质材料。此前,工业机器人始终难以在工业环境下稳定加工此类部件,而机床机器人的出现正使这一愿景成为现实,尤其在硬质材料加工领域展现出巨大潜力。
更多信息请访问:https://www.ifam.fraunhofer.de/en.html




